技術資料レーザードップラー速度計
測定原理
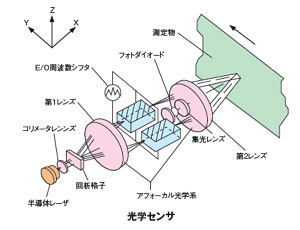
キヤノンLDVは、電気光学結晶を使用したE/O周波数シフタを内蔵しており、それぞれの周波数差がfRになるように周波数変調された2光束のレーザー光を入射角θで測定物に照射しています。
測定物からの散乱光は測定物の移動により発生するドップラー効果により周波数シフトをした光となり、フォトダイオード上に生じるスペックルの干渉光はF=2Vd+fRのドップラー周波数成分を持ったビート信号となり、静止状態からの測定が可能になっています。(dは対象物上で2光束が構成する干渉縞ピッチ)このドップラー周波数を信号処理することにより測定物の速度を算出しています。
また、キヤノンLDVは回折格子とアフォーカルレンズ系を組み合せる独自の光学系により、光源の波長が変動してもdが変動せず、速度精度に影響にくい構成をとっています。
センサー取付け方法
1. 光学センサーの設置方向

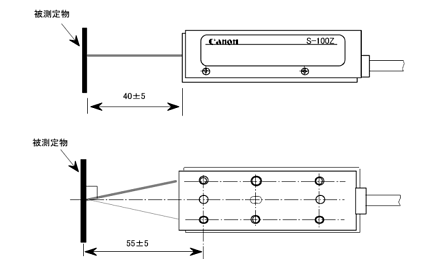
2. 測定距離
光学ヘッド S-100Zの例
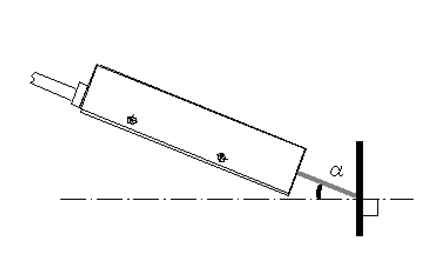
3. 角度誤差
3-1 角度誤差にならない方向
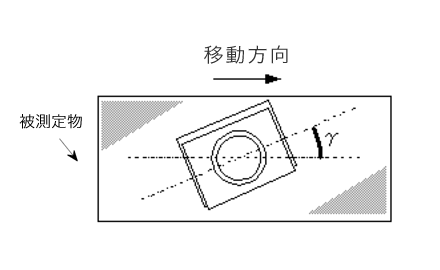
3-2 角度誤差になる方向
光学センサー(前面から見た図)
光学センサー(底面から見た図)
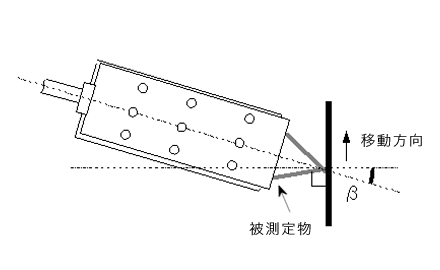
取付け角度ズレと誤差
| ズレ角β(γ) | 誤差 |
| 0.5度 | 0.003% |
| 1度 | 0.015% |
| 5度 | 0.350% |
レーザードップラー速度計のご相談・お問い合わせ
キヤノンマーケティングジャパン株式会社 産業機器事業部 第二営業本部 第一営業部 営業第二課
Webサイトからのお問い合わせ
レーザードップラー速度計のご相談・お問い合わせを承ります。
03-3740-3336
※年末年始弊社休業日は休ませていただきます。