取扱い製品|ガルバノスキャナー
ガルバノスキャナーとは
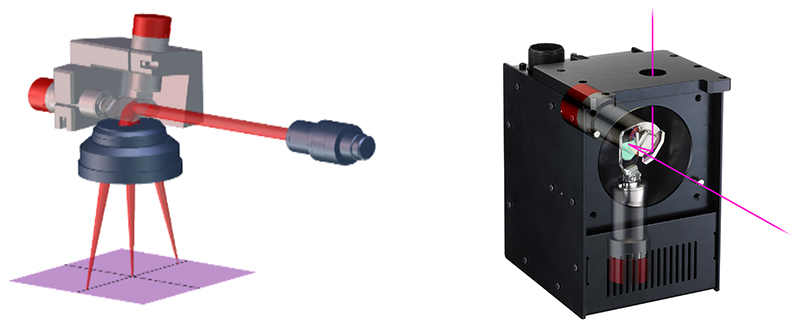
ガルバノスキャナーとは、レーザー用の光学系で1個以上のミラーを使用して、レーザー光を走査させる為の部品です。
主にレーザー光を反射する「ミラー」と、ミラーを回転させる「モーター」、モーターの回転角度・速度を制御する「ドライバー」で構成されています。使用するレーザー光の波長や太さによって、ミラーのコーティングや大きさ、モーターの大きさ・回転力などが決められます。モーターには、ミラーの回転角度を検出するためのエンコーダーが備えられており、エンコーダーから得られる位置信号、コントローラーからの指令信号をもとに、ドライバーがモーターの動きを制御します。ガルバノスキャナーは一般的に、X軸用・Y軸用の2つのミラーとモーターを組み合わせて使います。2軸それぞれを適切な角度に制御することで、2次元平面上の狙った位置にレーザー光を照射させる仕組みです。原理は非常にシンプルですが、それぞれの要素に非常に高い精度・性能が求められます。
ガルバノスキャナーの種類
ガルバノスキャナーには、「アナログ式ガルバノスキャナー」と「デジタル式ガルバノスキャナー」と呼ばれる2種類が存在しています。
これは、ミラーの位置検出方式と制御方式による違いです。
ミラーの位置検出はガルバノモーターに内蔵された位置検出センサ、制御方式はガルバノモーターに電流を供給するドライバーの種類による違いとなります。それぞれ“アナログ式”と“デジタル式”が存在します。
位置検出の違い(モーター)
-
アナログ式
位置検出に静電容量センサや光学センサを用いています。角度情報をアナログ信号で出力します。 -
デジタル式
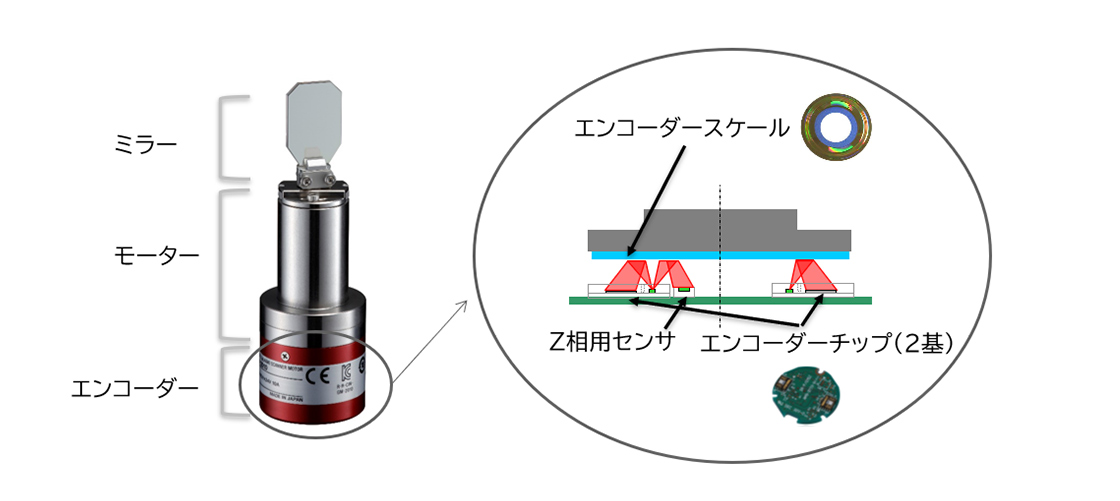
位置検出に光学式や磁気式のデジタルエンコーダーを用いています。角度情報をデジタルパルス信号(A/B相やシリアル)で出力します。
デジタルエンコーダーを用いていることで、分解能や再現性が高いのが特徴です。
制御方式の違い(ドライバー)
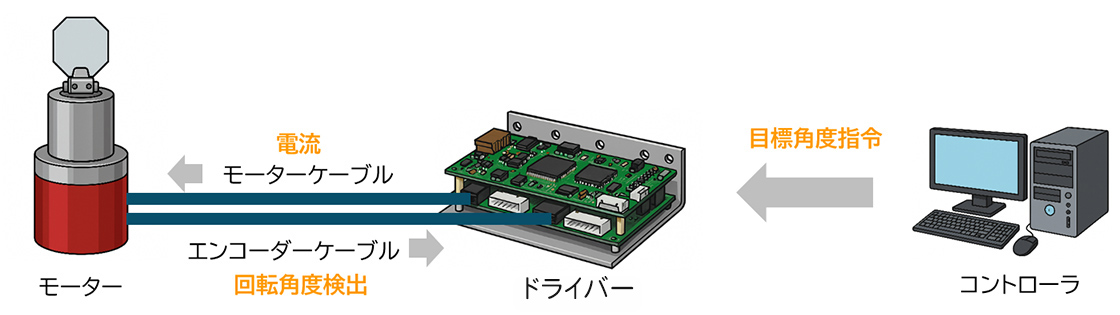
ドライバーは、上位のコントローラーから受け取った角度指令に基づき、ガルバノモーターに必要な電流を供給します。
また位置検出センサによって出力された角度情報を、現在角度と目標角度の差を補正します(フィードバック処理)。
-
アナログ式
上位のコントローラーからの角度指令が、アナログ電圧です。
アナログ回路で位置を調整する制御方式です。
フィードバック処理は、電圧差をアナログ回路で補正します。 -
デジタル式
上位のコントローラーからの角度指令が、シリアル通信等のデジタル信号の指令です。
マイコンやDSPで位置を調整する制御方式です。
エンコーダーから出力される角度情報をデジタル演算で補正し、精度の高いフィードバック制御が可能です。
アナログ式ガルバノモーターとアナログ式ドライバーの組み合わせを、「アナログ式ガルバノスキャナー」と呼びます。
一方、デジタル式ガルバノモーターとデジタル式ドライバーの組み合わせを、「デジタル式ガルバノスキャナー」と呼びます。
また、アナログ式ガルバノモーターとデジタル式ドライバーのハイブリット型のガルバノスキャナーも存在しており、ドライバー側がデジタル制御を行うため 「デジタル式」に分類されます。
| アナログ式ガルバノスキャナー (アナログ式モーター +アナログ式ドライバー) |
ハイブリット型 (アナログ式モーター +デジタル式ドライバー) |
デジタル式ガルバノスキャナー (デジタル式モーター +デジタル式ドライバー) |
モーター | 位置検出センサ | アナログ位置センサ (静電容量センサや光学式センサ etc.) |
デジタルエンコーダー (光学式や磁気式 etc.) |
|---|---|---|---|---|
| センサ信号 | アナログ電圧信号 | デジタルパルス信号 (A/B相やシリアル etc.) |
||
| ドライバー | 制御信号入力 | アナログ電圧指令(±10V etc.) | デジタル信号(シリアル通信 etc.) | |
| 内部制御方式 | アナログ回路で 位置を調整する制御 |
マイコンやDSPで 位置を調整する制御 |
||
| フィードバック処理 | アナログ回路で閉ループ制御 | デジタル演算で閉ループ制御 | ||
アナログ式とデジタル式ガルバノスキャナーの性能比較
精度
ミラーの角度をどれだけ正確に制御・再現できるかを表す指標です。瞬間的な制御の正確さを表します。
デジタル式ガルバノスキャナーは、アナログ式ガルバノスキャナーに比べ精度面で優れています。
-
アナログ式ガルバノスキャナー
上記コントローラーからの指令がアナログ電圧信号で送られます。
この電圧はノイズや温度変化、電源の揺らぎの影響を受けやすく、指令値に微小な誤差が発生します。
位置検出センサに用いられる静電容量センサや光学センサは、角度に応じてアナログ電圧を出力します。
この信号も同様に外乱当の影響を受けやすく、再現性や安定性に影響を及ぼします。 -
デジタル式ガルバノスキャナー
上位コントローラーからの指令がデジタル信号で送られます。ノイズ耐性が高く、正確な指令値を安定して送信できます。
位置検出センサに用いられる光学式や磁気式のデジタルエンコーダーは、角度情報をデジタルパルス信号(A/B相やシリアル)で出力します。
ノイズの影響を受けにくく、分解能・再現性に優れるといった特長があります。
ドリフト
時間や環境変化(特に温度)によって、出力値が徐々に変化してしまう現象です。
ガルバノスキャナーにおいては、ミラーの角度検出センサの出力が、実際の角度とズレてしまうことを指します。
デジタル式ガルバノスキャナーは、アナログ式ガルバノスキャナーに比べドリフト面で優れています。
-
アナログ式ガルバノスキャナー
位置検出センサに用いられる静電容量センサや光学センサは、温度変化、電源の揺らぎ、ノイズの影響を受けやすく、オフセットやゲインの変動が発生しやすくなります。その結果、角度誤差が蓄積し、長時間の安定性が低下します。
またアナログ式ドライバーの場合、回路の温度依存性等によりドリフトが発生しやすい傾向があります。 -
デジタル式ガルバノスキャナー
デジタル式は光学的・磁気的なパターンを読み取り、デジタルパルス信号(A/B相やシリアル)として角度情報を出力します。
電源変動や温度変化の影響を受けにくく、長距的な安定性に優れています。
また、デジタル式ドライバーの場合、DSPやFPGAの演算処理で角度補正や、フィードフォワード制御等により、補正が可能です。
キヤノンのデジタル式ガルバノスキャナー

キヤノンのガルバノスキャナーは、独自の超高精度光学式エンコーダーを搭載した、デジタル式のガルバノスキャナーです。
高速DSPによる独自のデジタルサーボ技術により高分解能、高い位置決め再現性が得られます。
エンコーダースケールに基づいた信号が出力されるため、温度変化に伴うドリフトが極めて小さく、安定した加工が可能となっております。
キヤノンのデジタル式ガルバノスキャナーの構造
制御方式
GM-2000シリーズでは、下記の仕様を実現しております。
GM-2000シリーズでは、下記の仕様を実現しております。
最小指令分解能 :0.087μrad以下
位置再現性 :1μrad以下
原点位置再現性 :1μrad以下
静止安定性 :0.54μrad以下
温度ドリフト :3μrad以下

チューニング(ガルバノスキャナー調整作業)
ガルバノスキャナーは、ミラー、モーター、ドライバーのペアでチューニングといった調整作業が必要です。
これは、アナログ式デジタル式問わず必要な作業です。
キヤノンのガルバノスキャナーは、ドライバー付属のGalvano Scanner Control softwareを使用することで
ユーザー様にて、マニュアルチューニングを実施することが可能です。
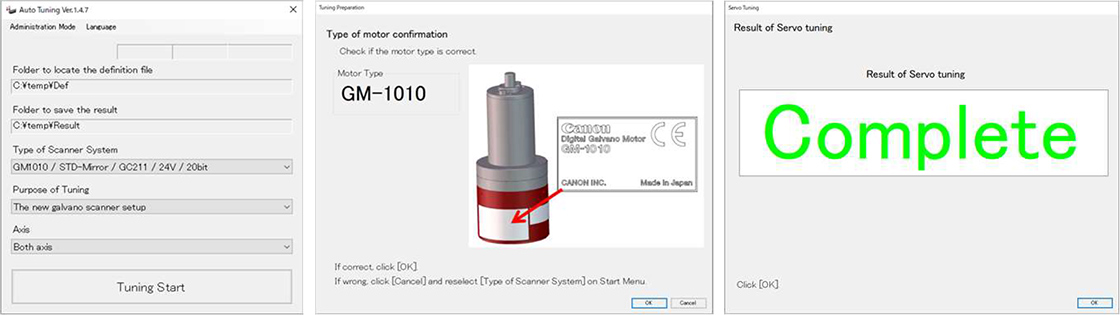
また、同様にドライバーに付属するソフトに、Auto Tuning Softwareといったものがございます。
こちらのソフトを使用することで、ユーザー様でも簡易にチューニングすることが可能となっております。
ウィザード形式で簡単にチューニングを行えます。
おすすめコンテンツ

レーザーソリューションについてご相談、お問い合わせ
キヤノンマーケティングジャパン株式会社 産業機器事業部 第二営業本部 営業部 営業第二課
Webサイトからのお問い合わせ
レーザーソリューションについてのお問い合わせを承っております。
受付時間:平日 9時00分~17時00分
※土日祝日・当社休業日は休ませていただきます。